Research Projects
Educational Technology & Conversational Agents
Conversational Agents (CAs) — systems that imitate natural language discourse — can take on various forms (virtual, physical, embodied, non-embodied) and ways of expression (verbal, non-verbal, etc.). Among the different roles CAs can play, they have become a widely used tool in learning environments and there is evidence to suggest that the manner in which pedagogical CAs converse with learners as well as the relationship that develops between them, can enhance learning outcomes.
Humorous Teachable Chatbot
Previous studies have highlighted the benefits of pedagogical CAs using socially-oriented conversation with students. In this work, we examined the effects of a chatbot's use of affiliative and self-defeating humour on learners' perception of the agent and attitudes towards the task. [DOI]

A Curious Robot
As curiosity can enhance learning, memory, and exploration, understanding how to elicit it can inform the design of educational technologies. In this work, we investigated how a social peer robot's verbal expression of curiosity is perceived, whether it can affect emotional and/or behavioural curiosity contagion in students, and how it impacts learning. [DOI]
Interjections & Music in a Voice-based Agent
Prior work on CAs across various domains suggests that expression of internal states has a positive infuence on the human-agent relationship. In this project, we explored how expressive interjections (e.g.,“yay”, “hmm”, “oh”) and brief expressive musical executions added to the speech of a pedagogical CA infuences the human-agent relationship and learning outcomes. [DOI]
Teachers' Perspective on Social Robots in the Classroom
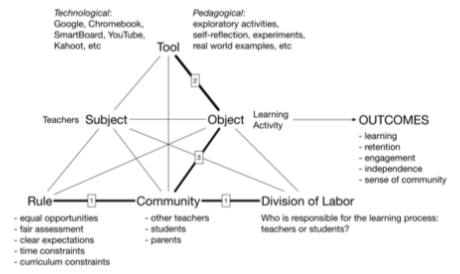
With advances in AI, research is increasingly exploring the potential functions that social robots can play in education. As teachers are a critical stakeholder in the use and application of educational technologies, we conducted a study to understand teachers' perspectives on how a social robot could support a variety of learning activities in the classroom. [DOI]
Learning by Teaching Web App
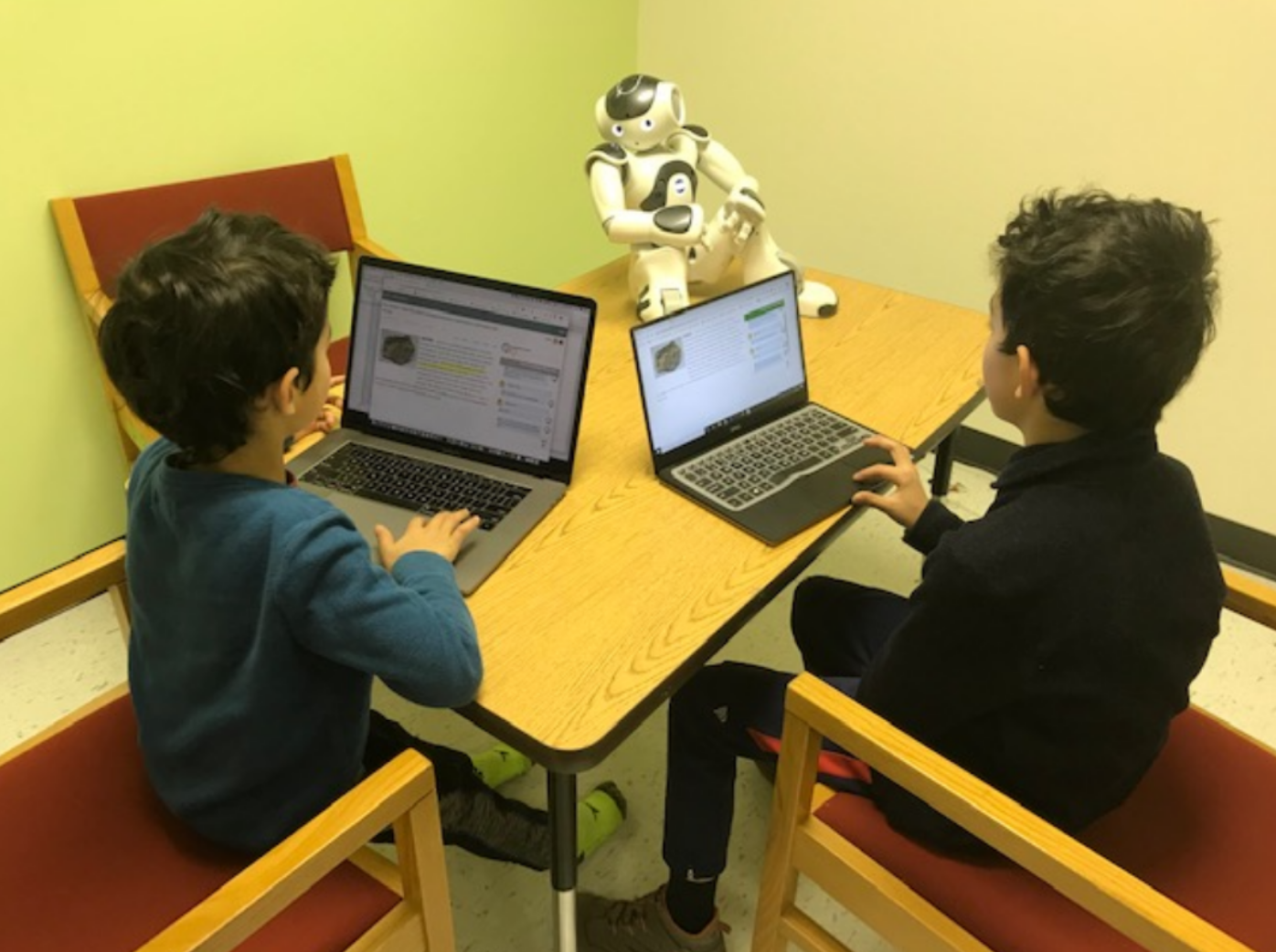
Learning by teaching is an established pedagogical technique; however, the exact process through which learning happens remains difficult to assess. Prior research proposed the use of teachable CAs acting as students, in order to facilitate more controlled studies of the learning by teaching phenomenon. In this work, we designed a learning by teaching platform which allows students to work individually or in groups to teach a CA. A 4-week exploratory study with 12 fourth and fifth grade elementary school children was conducted to test the platform and refine the design. Today, the platform is used by researchers to test interaction designs on learning outcomes. [DOI]
Amazon Alexa Skills Challenge: Kids
Designed, built, and deployed an Amazon Alexa Skill Alien Invasion, with two colleagues: Nalin Chhibber and Sangho Suh, as part of the Alexa Skills Challenge: Kids, a competition to publish an Alexa skill for children under 13.
Neural Correlates of Curiosity
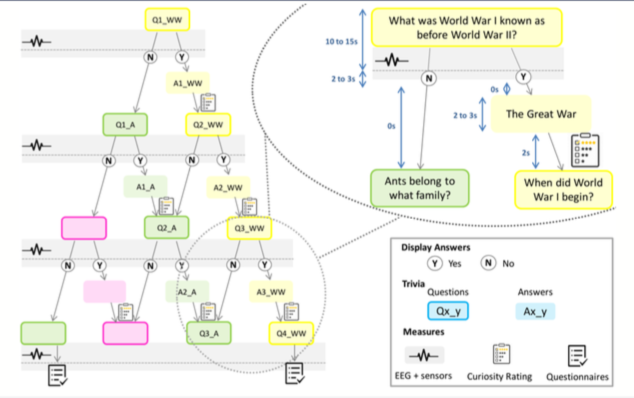
Understanding Curiosity
Understanding the neurophysiological mechanisms underlying curiosity and therefore being able to identify the curiosity level of a person, would provide useful information for researchers and designers in numerous fields such as neuroscience, psychology, and computer science. A first step to uncovering the neural correlates of curiosity is to collect neurophysiological signals during states of curiosity, in order to develop signal processing and machine learning (ML) tools to recognize the curious states from the non-curious ones. In collaboration with colleagues at Inria Bordeaux (Lead: Aurelien Appriou). [DOI]
Voice Perception - Cochlear Implants
Cochlear implants (CI) restore hearing in individuals with profound to severe hearing loss via electric stimulation of the auditory nerve. Unfortunately, modern CIs suffer from degraded fine spectrotemporal resolution. As a result, CI users have difficulty perceiving important voice characteristics for higher level speech perception, specifically, the fundamental frequency (F0) and the vocal-tract length (VTL).
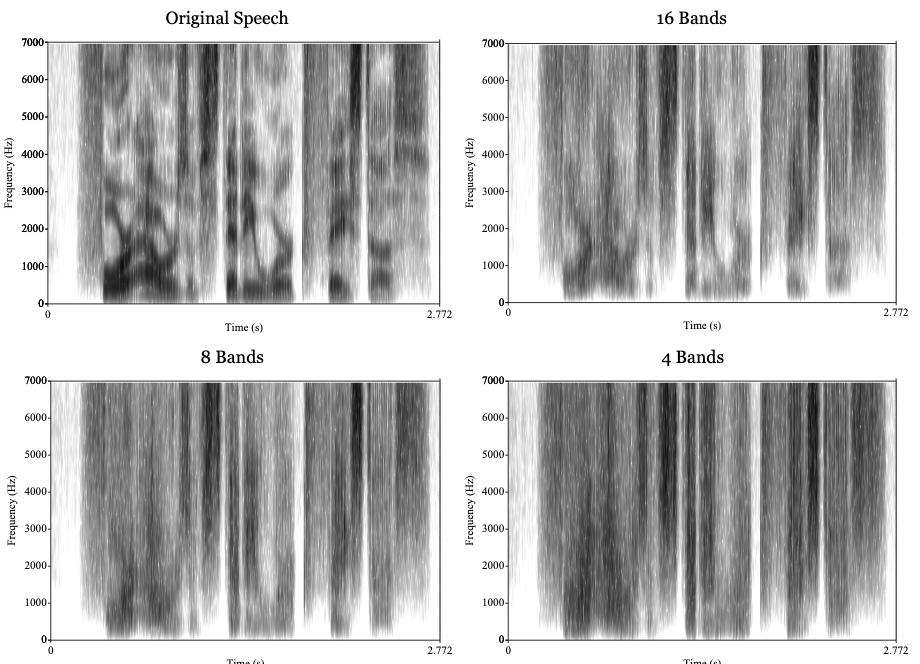
Bimodal Hearing
Research has shown that CI users with residual low-frequency hearing greatly benefit from a hearing aid in the non-implanted ear. This is known as bimodal hearing and provides electric stimulation via the CI, in addition to acoustic amplification for the low-frequency sounds. In implant users with low-frequency residual acoustic hearing, this bimodal electro-acoustic stimulation may provide additional voice-related cues, such as low-numbered harmonics and formants, which could improve F0/VTL perception. In acoustic noise-vocoder simulations, where added low-pass filtered speech simulated residual hearing, a strong bimodal benefit was observed for F0 perception. No bimodal benefit was observed for VTL, which seems to mainly rely on vocoder spectral resolution. [DOI]
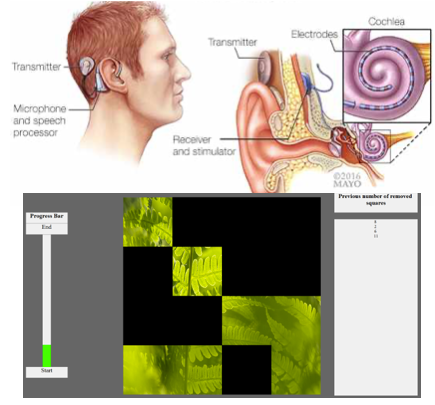
Neurofeedback (Brain-Computer Interfaces)
An electroencephalography (EEG) based neurofeedback system was developed, aimed at improving VTL perception using CI simulations. The results indicated a necessity for further research into event-related potentials (ERPs), specifically the P300 waveform, elicited by non-word, vocoded speech stimuli. [Part of Master's thesis].
Cognitive and User Modelling
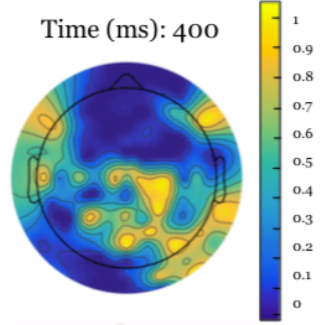
Theta Oscillation Phase-Locking
EEG study on theta oscillation phase-locking after attentional blink (AB) training. The AB is a phenomenon which demonstrates the attention limitations of human visual processing. The cause of the AB is thought to be due to a reduction in processing capacity once the first target has been perceived, preventing the processing and conscious perception of a second target.
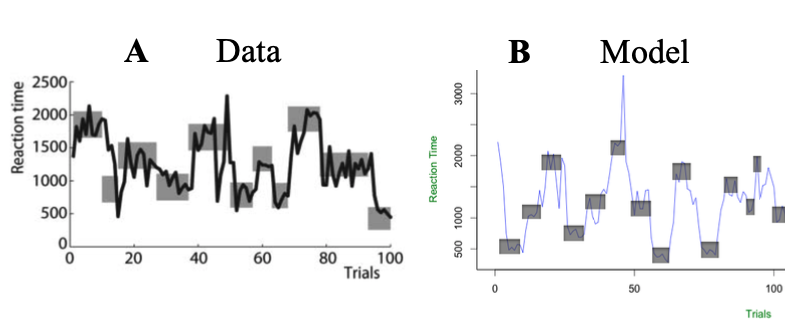
ACT-R Cognitive Architecture
How people make time estimations has been heavily researched over the years. This work developed a cognitive model based on analyses of data from a time estimation task. The model focusses on the role feedback plays on subsequent estimations and suggests ways in which memory traces are formed and retrieved.
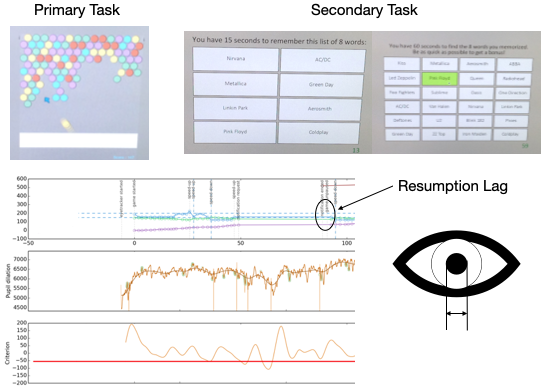
Interruption Management System
With multitasking comes interruptions and there is a growing literature on the detrimental effects interruptions have on performance. When best to interrupt a user has become a major area of research in the field of HCI. We developed and tested a system which interrupted users based on their cognitive workload (measured by pupil dilation), and measured their performance by resumption lag.
Human-Robot Interaction
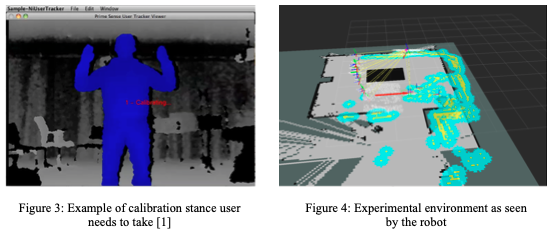
The Search For A Waving Person
With the use of a Kinect sensor and ROS modules a behaviour was built which searched for a waving person in a room by rotating on the spot by small intervals. Once the person was found the robot navigated to him or her and stopped directly in front at a face-to-face angle. Experiments were conducted to measure the accuracy of the behaviour.
EMG-Powered Robotic Hand
Project for Science LinX, an organization which aims to familiarize high school students with science through interactive exhibits and workshops throughout the Netherlands.